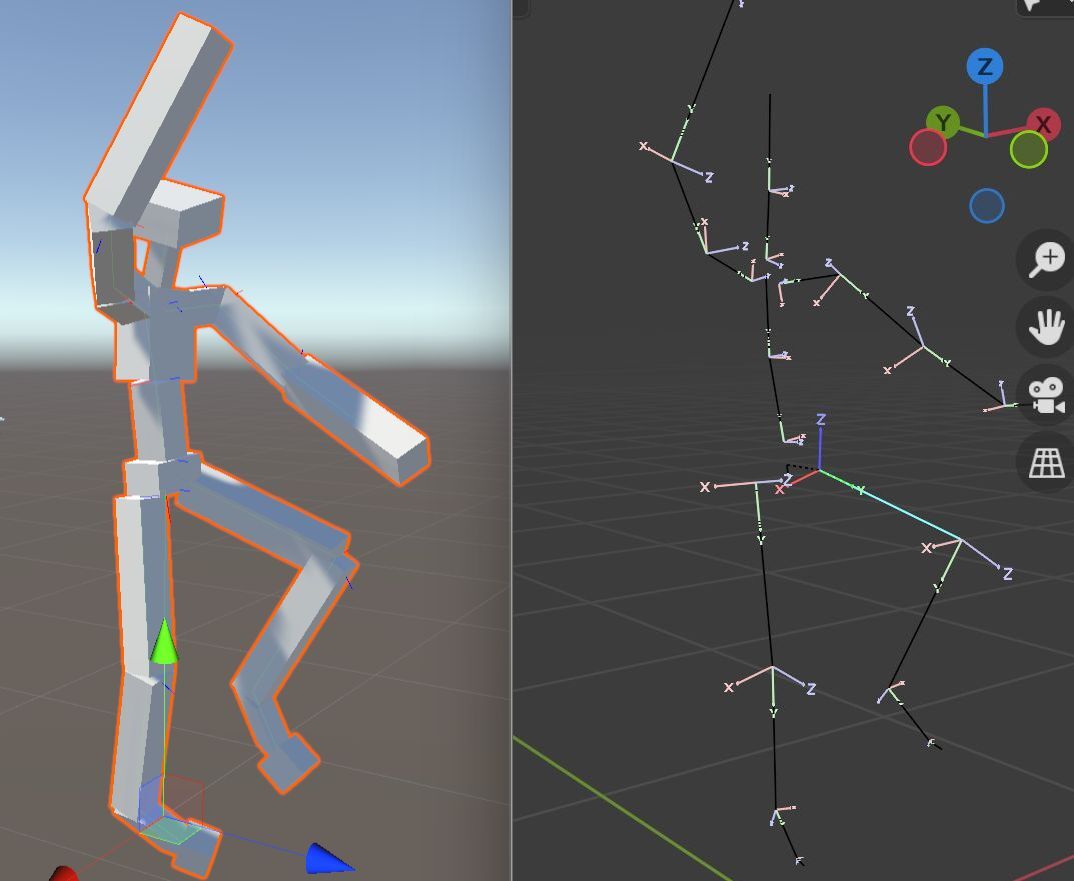
Armature to Unity#
Blender の Armature のポーズを Unity 骨格に転送する実験
Blender#
import bpy
import json
pose = bpy.context.active_object.pose
print(pose)
eulers = {}
for b in pose.bones:
#print(b, b.rotation_euler)
e = b.rotation_euler
eulers[b.name] = (e.x, e.y, e.z)
print(json.dumps(eulers))
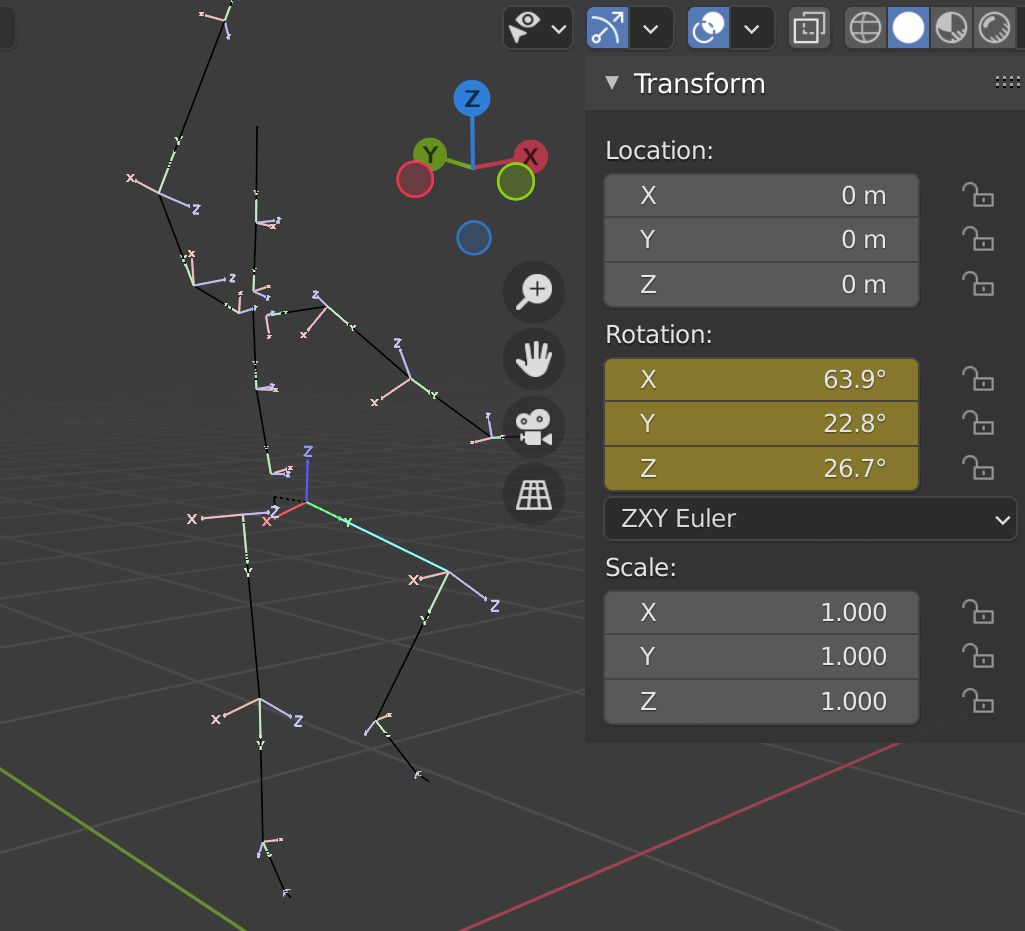
これが、bvhと同じになるかと思っていたのだが違う。 bvhから ボーンローカルEuler角にする。
Unity#
euler角を右手系から左手系に変換する。
{x, -y, -z}
local軸のベクトルを得る。
Vector3 x_axis;
Vector3 y_axis;
Vector3 z_axis;
回転を作る。
var Rx = Quaternion.AngleAxis(x, x_axis)
var Ry = Quaternion.AngleAxis(y, y_axis)
var Rz = Quaternion.AngleAxis(z, z_axis)
YZXの順に乗算する。
var transofrm.localRotation = toTPose * Ry * Rz * Rx;